「ミニぷぱ」やってます
1 Min Read
0
みなさま、Mini Pupperというロボットはご存知でしょうか?
Mini PupperはMangdang Technology社が開発した小型の犬型ロボットで、プラモデルのように自作でき、専用のコントローラや、PS4コントローラで操縦したり、プログラムを組んで動かしたり、はたまた小型LiDARを搭載して自律歩行させたりすることができます。
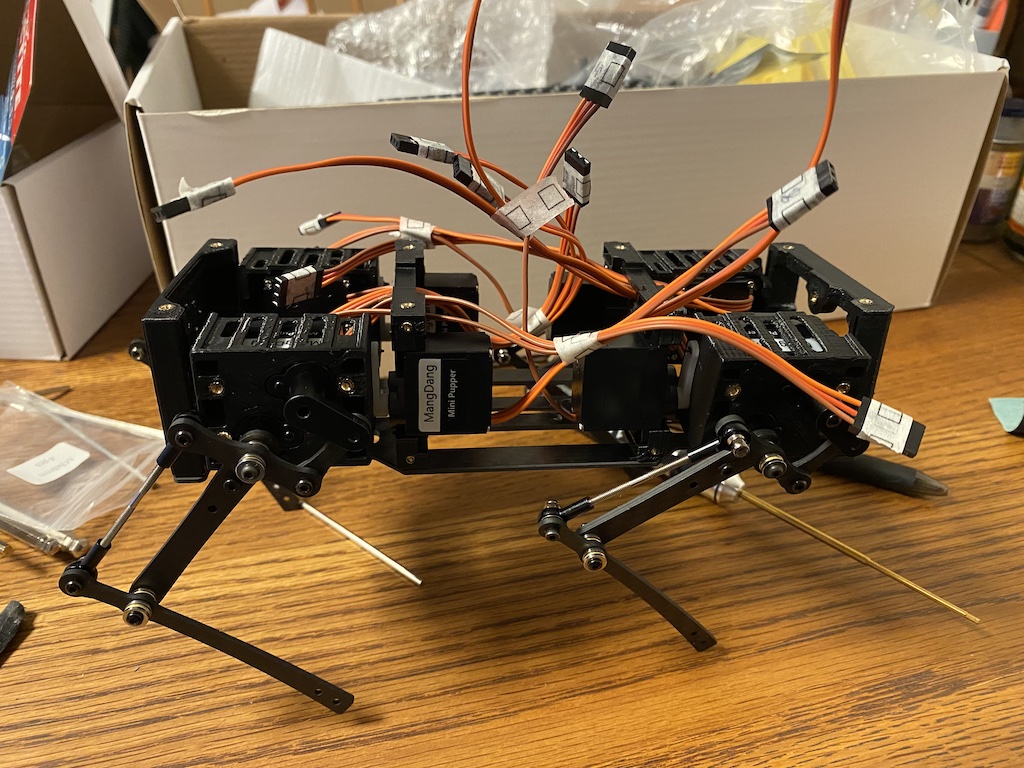
Mini PupperはROS Noetic環境で動作しますので、ROSの学習、ロボットの学習にぴったりであるため、私も購入し、Mini Pupperにさまざまなことをやってもらおうかなと思います。
例えば、ROS Noetic環境で動作するのでexplore_liteで未知の空間を探索し、地図を作成。作成した地図をもとに指定位置まで移動して鳴き声をあげたり、鳴き声を誰かの名前にして、その人の場所まで移動させて名前を呼ばせてみたり、案内役として歩いてもらうのもいいですね。
(歩くスピードと人の歩行速度に差があるのが難点かもしれませんが・・・)
また、物体検出アルゴリズムのYOLO v5と連携して、物体検知&追従をすることもできます。
弊社では、Pepperをはじめとしたコミニュケーションロボットのアプリケーション開発にと共に、このようにROSを用いたロボットアプリケーション開発も実施しております。
ロボットアプリケーションの開発についてご興味のある方は、お気軽にお問い合わせいただければと思います。